

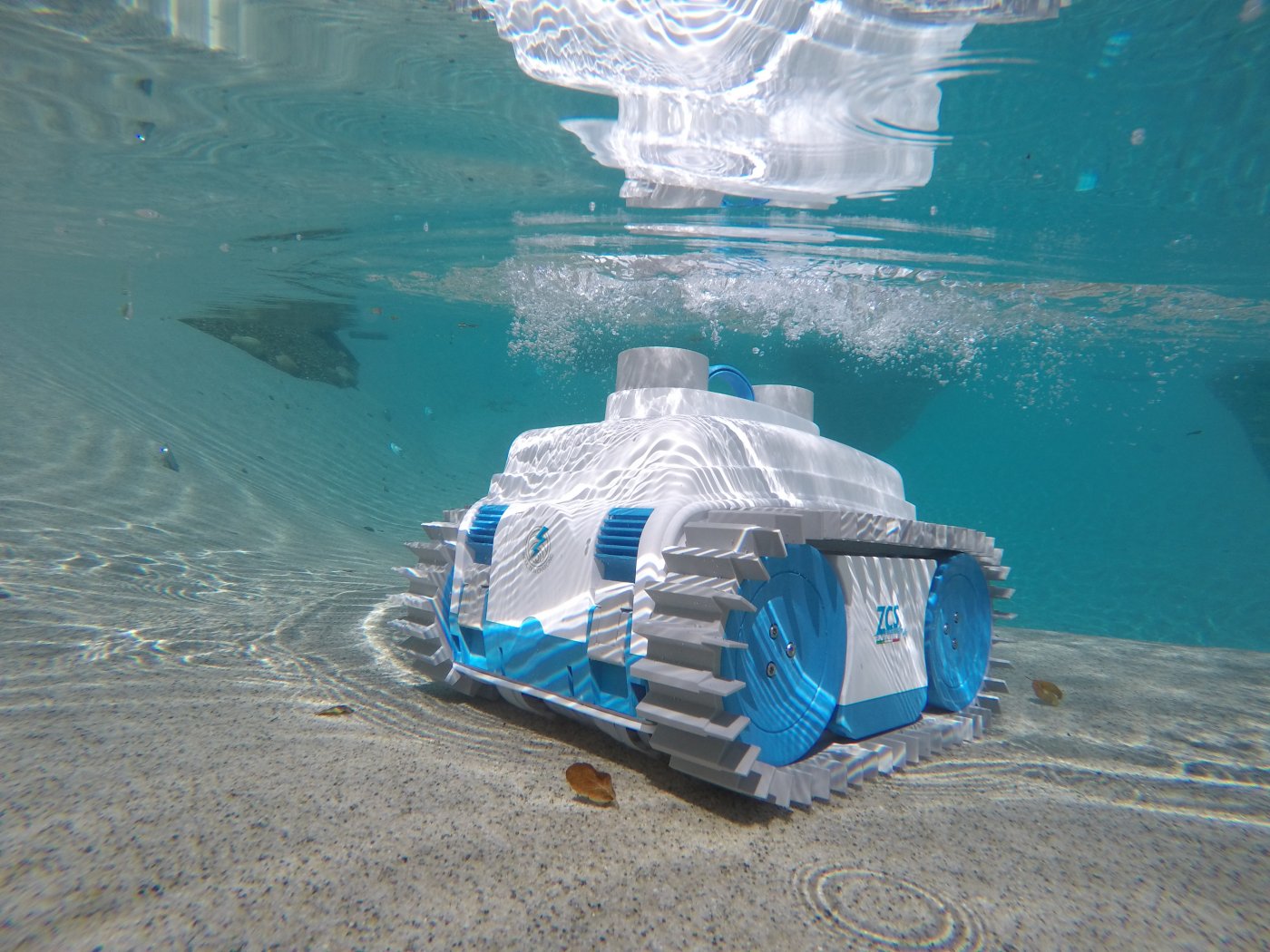
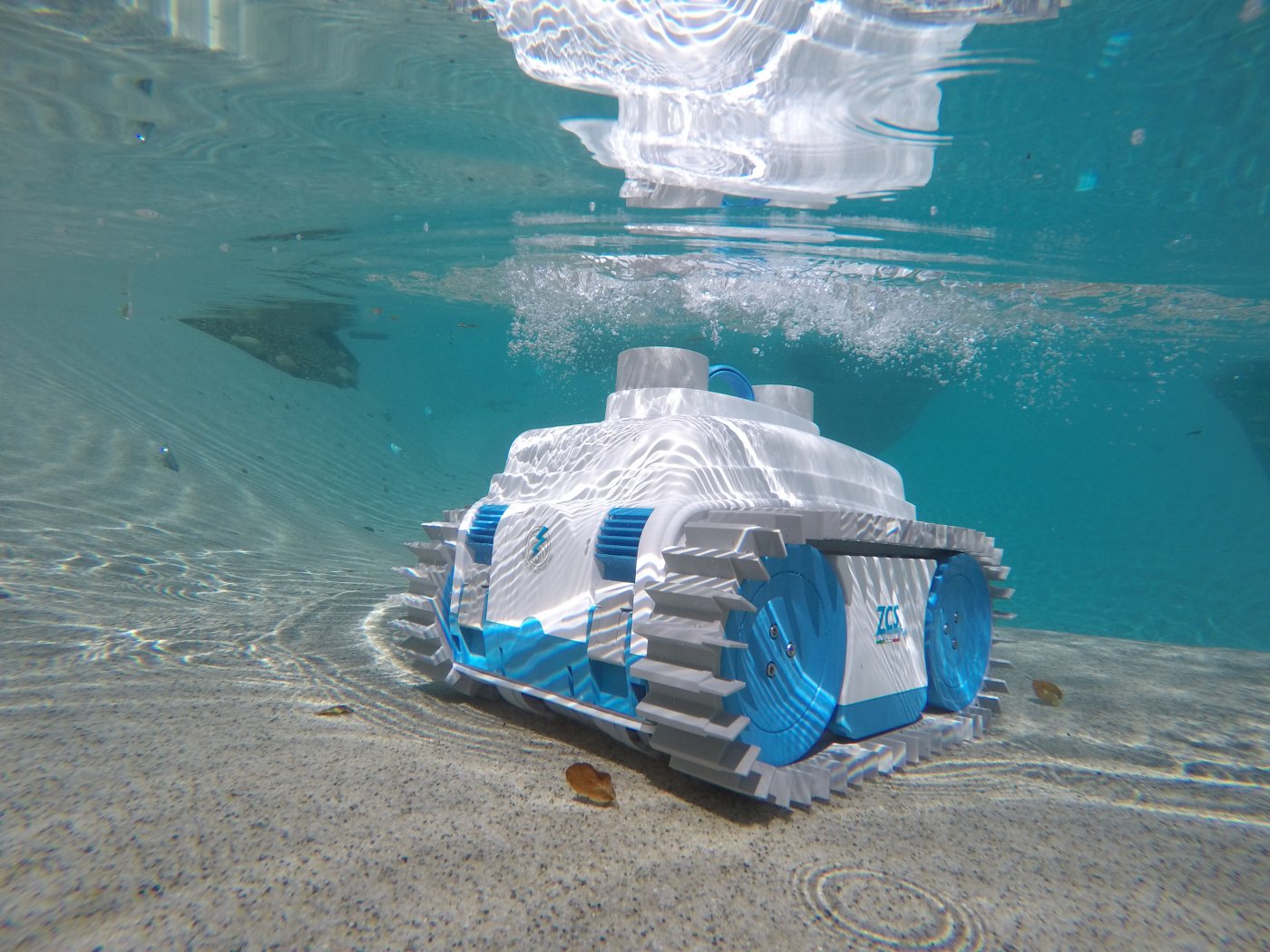
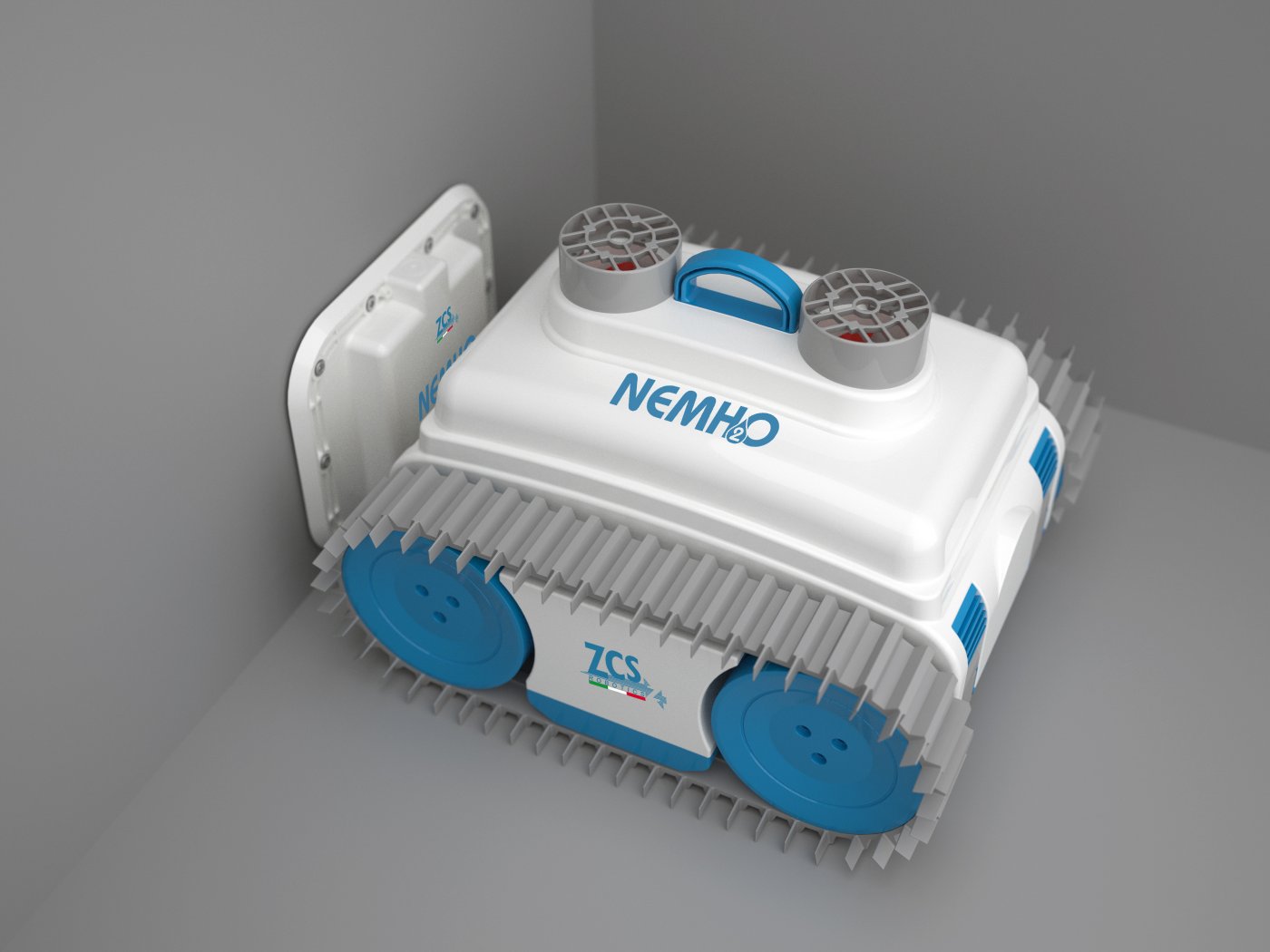
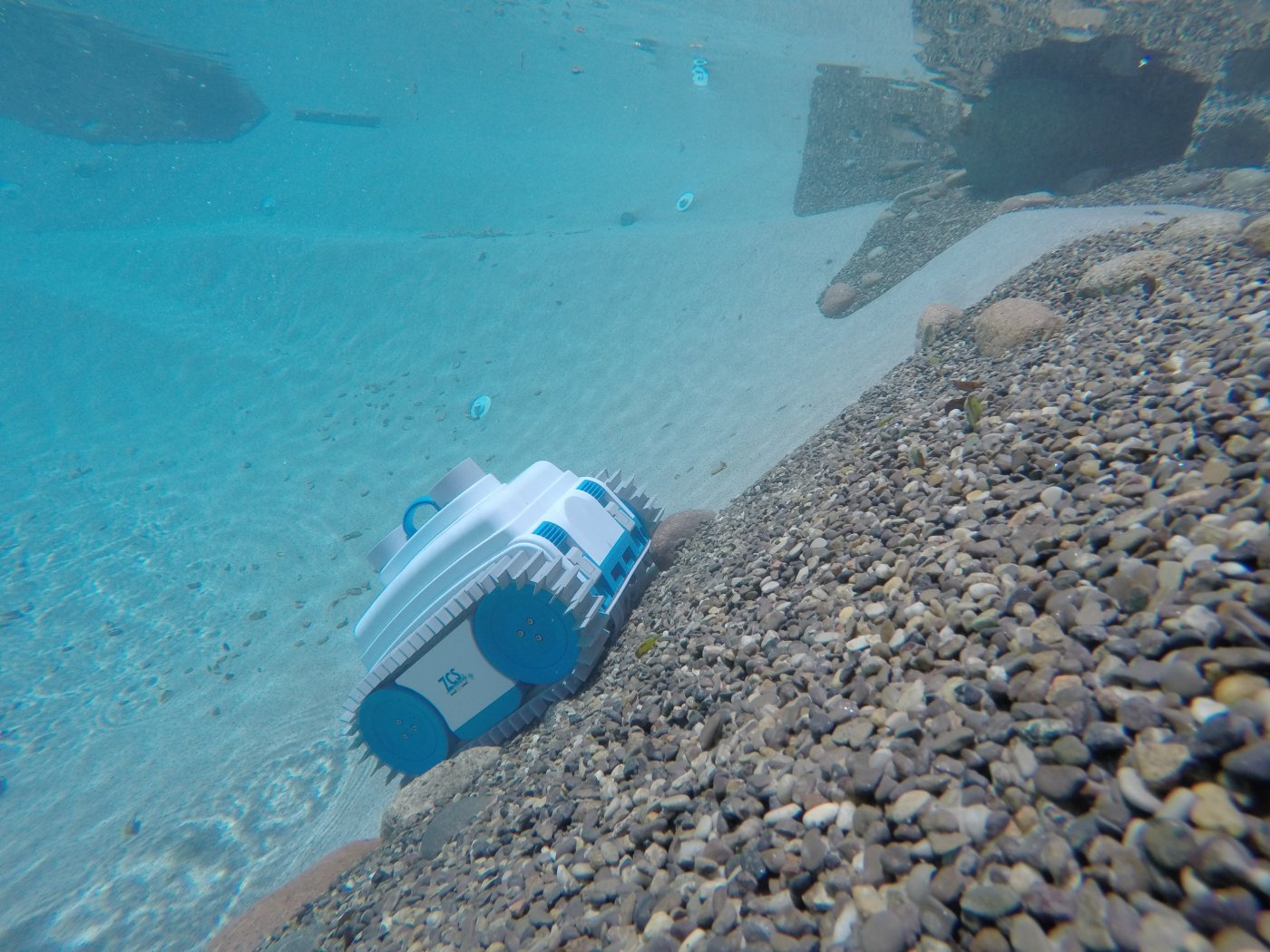
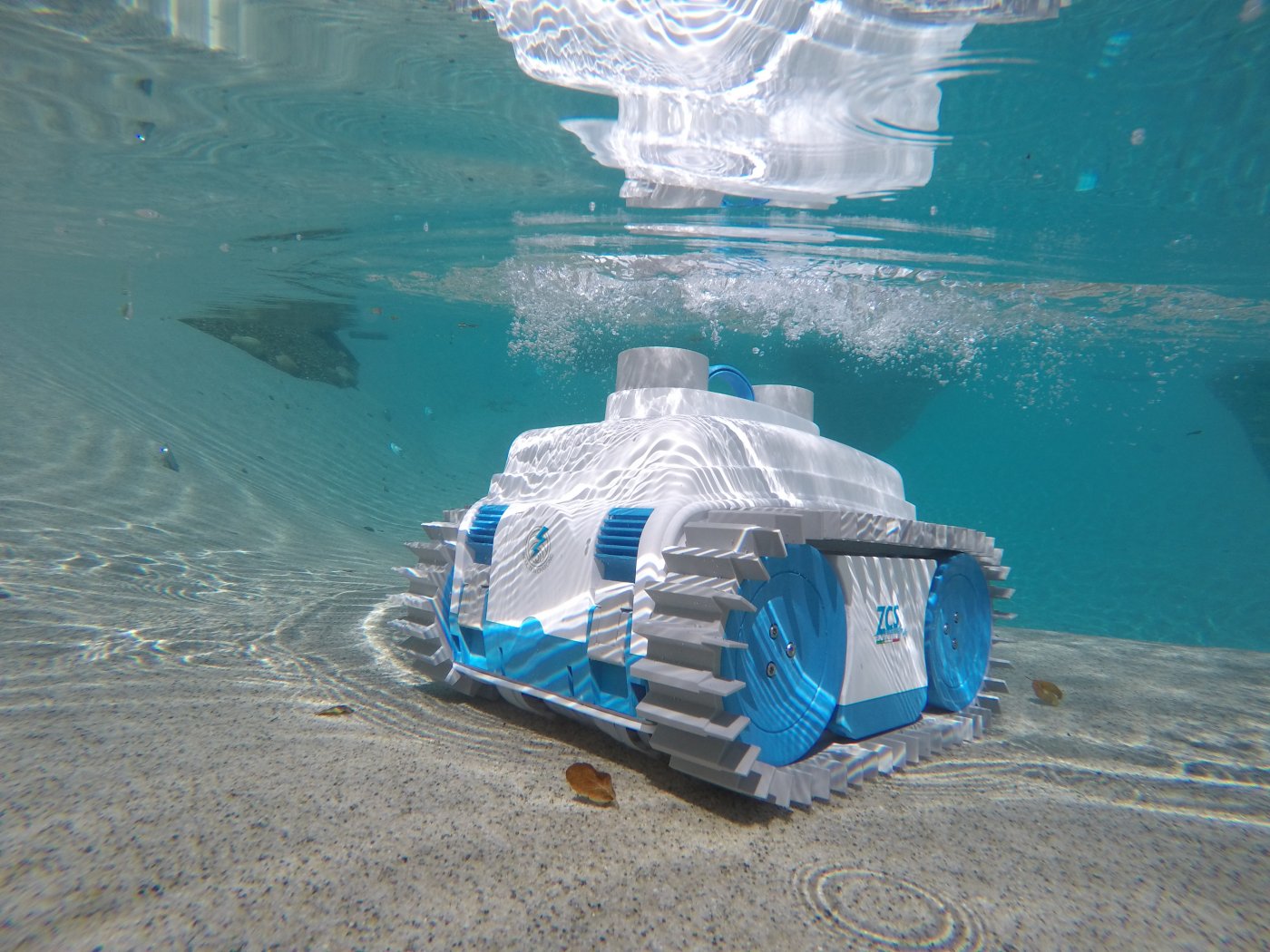
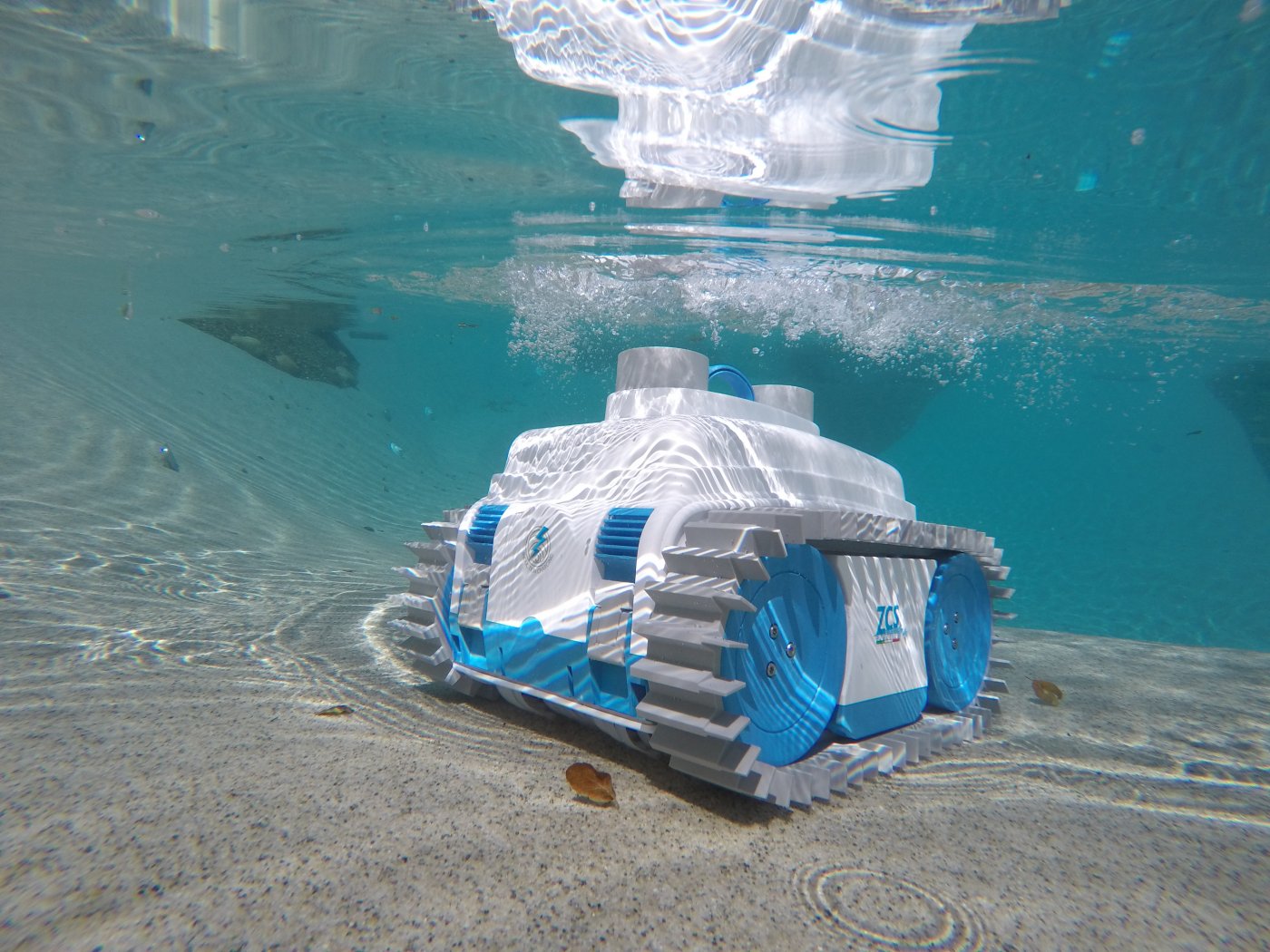
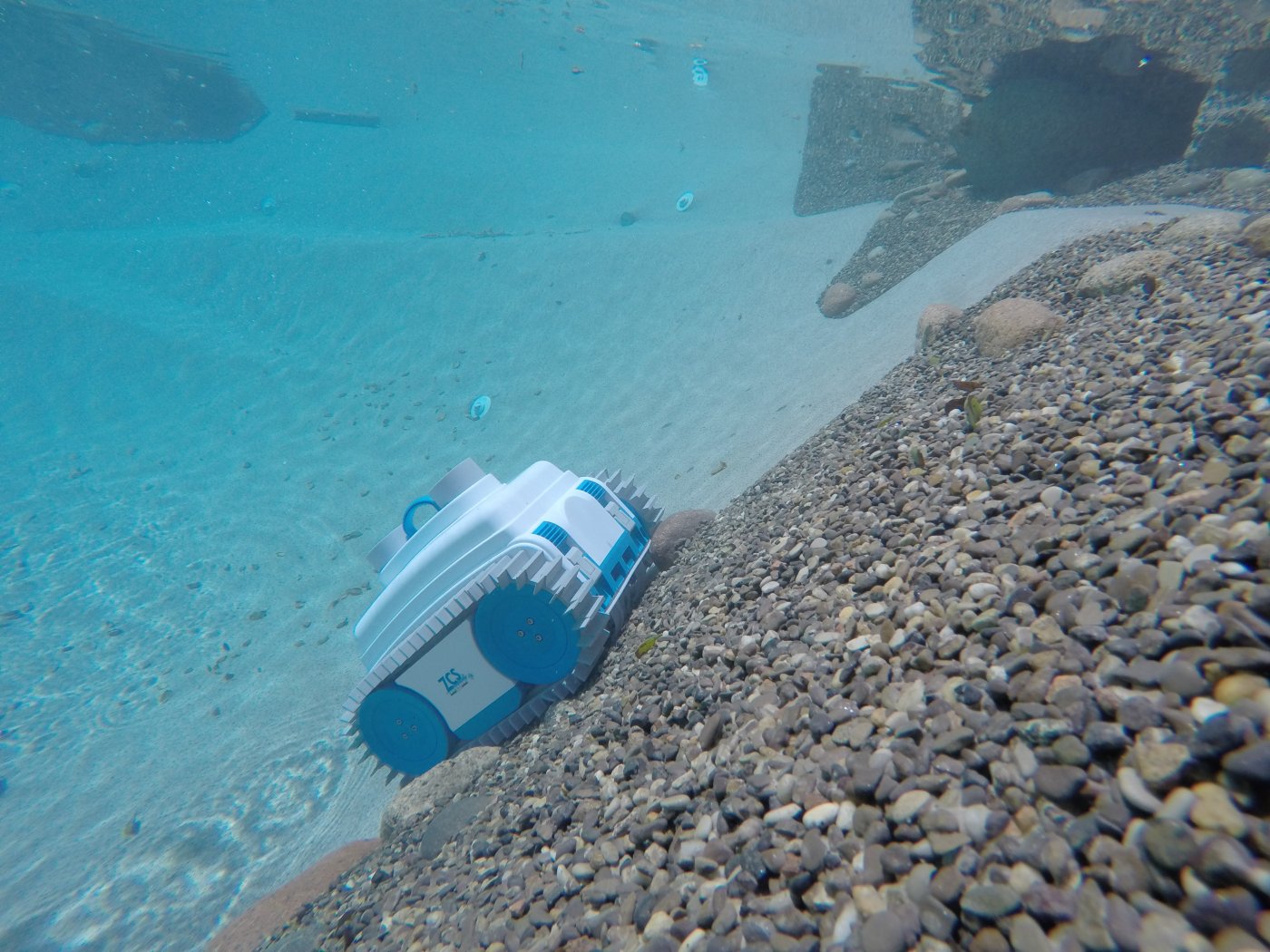
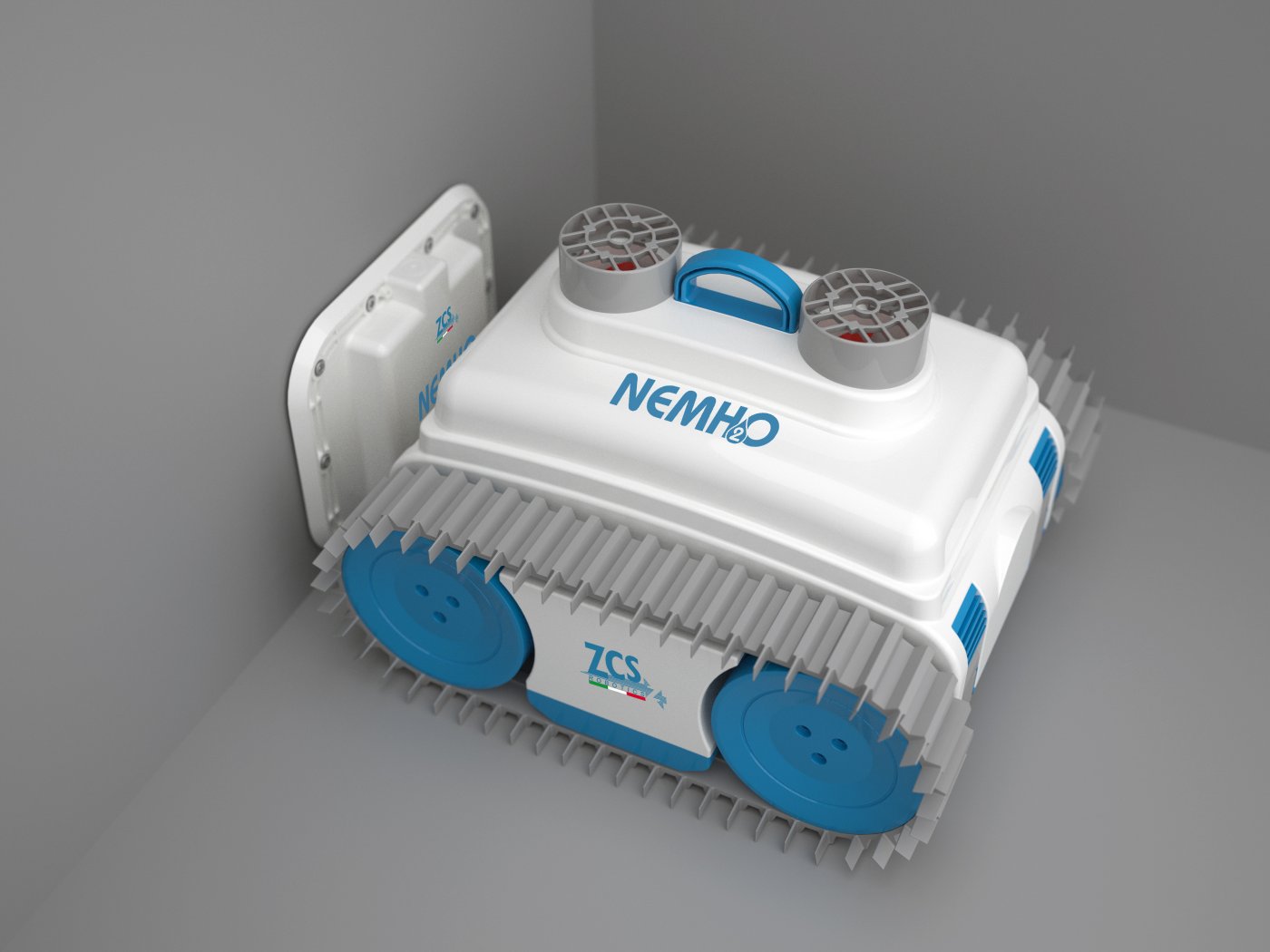
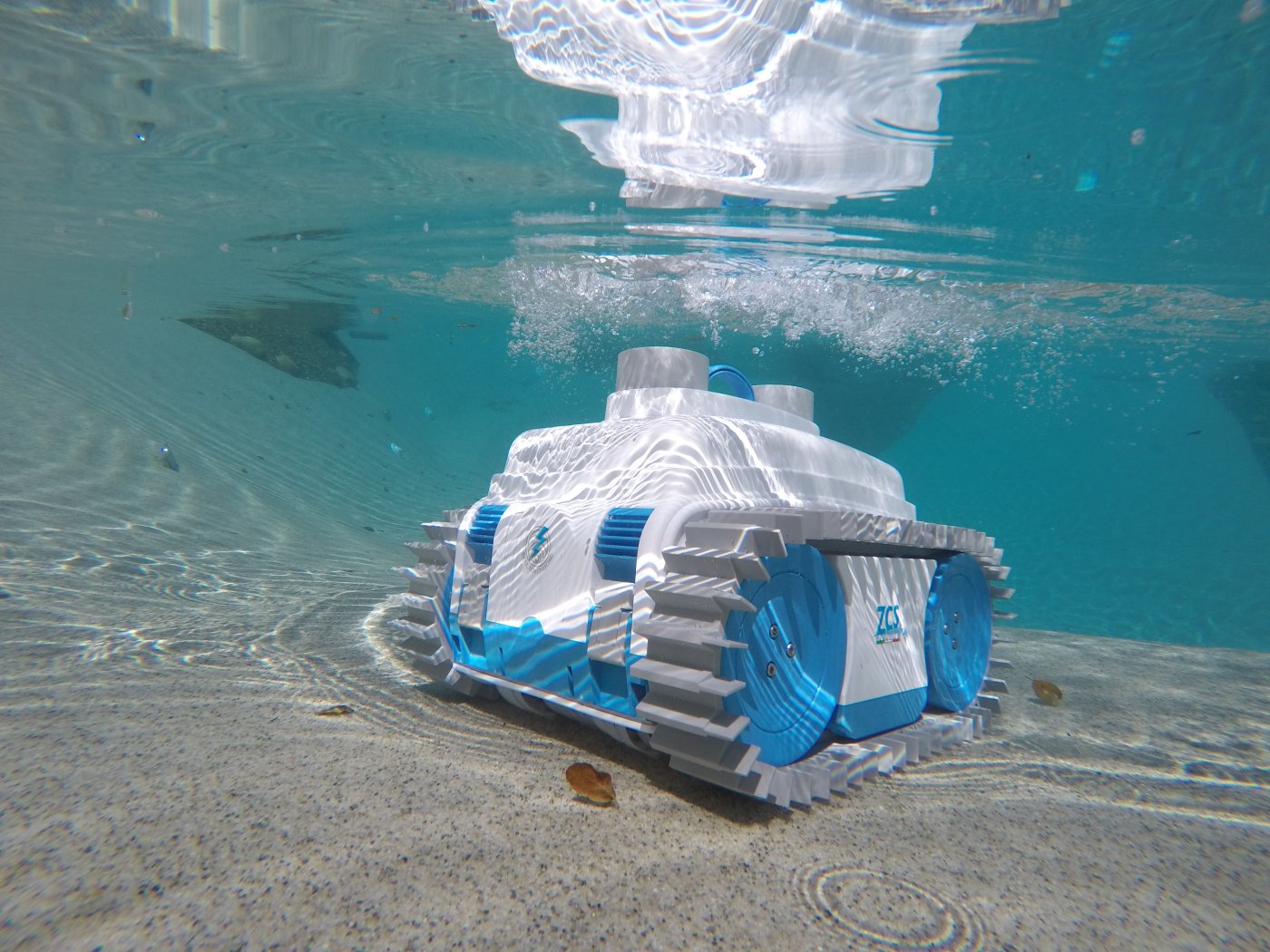
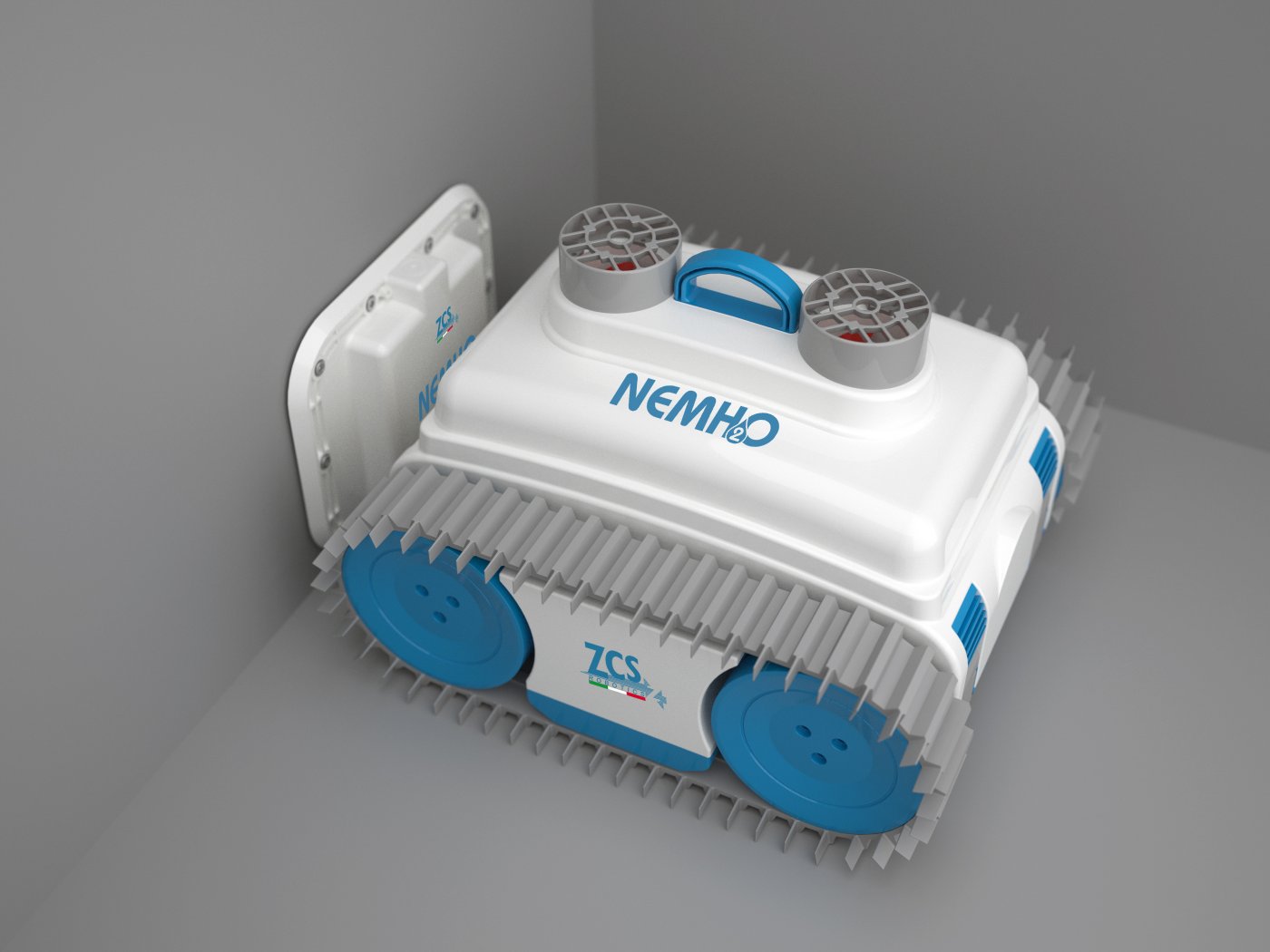
NEMH2O to innowacyjny robot, który został opracowany przez twórców Ambrogio Robot. Celem pracy robota jest zapewnienie w pełni automatycznego czyszczenia basenu lub stawu kąpielowego. NEMH2O wyróżnia się bezprzewodową technologią, dzięki czemu może poruszać się bez ograniczeń, dopasowuje się do każdej powierzchni, zarówno pionowej,jak i poziomej. Pracuje w zbiornikach o powierzchni gładkiej lub chropowatej, radzi sobie w narożnikach, łukach, a także na stopniach. NEMH2O wykorzystuje obecność systemu filtrów zainstalowanych w basenie lub stawie kąpielowym i współpracuje z nimi. Dzięki temu, zainstalowany robot może pozostać w wodzie przez cały rok. Robot ładuje się samodzielnie w wodzie poprzez indukcję, bez potrzeby jakiejkolwiek ingerencji z zewnątrz.
-
-
NEMH2O CLASIC
do basenu istniejącego 13 998,00 zł
-
-
maksymalna długość basenu (m): 12
prędkość poruszania się po dnie (m/min): 8-12
prędkość poruszania się po ścianach (m/min): 8
maksymalna głębokość (m): 10
filtr: 2 lt, 0,5 mm
ilość turbin: 2
typ silnika: bezszczotkowy
przeniesienie napędu: złącza magnetyczne
obudowa: "hermetyczna skorupa"
baterie litowo-jonowe (25.9v): 13,75 ah
zasilacz: 186 w
ładowanie indukcyjne: 4 a
tryb ładowania: automatyczny
średni czas ładowania: 03:30
średni czas pracy +/- 20%: 2:00
-
maksymalna długość basenu (m): 12
-
-
żyroskop, enkoder, inklinometr: tak
odbiornik bluetooth: tak
-
żyroskop, enkoder, inklinometr: tak
-
-
waga robota razem z bateriami (kg): 21
wymiary robota (mm): 410x460x320h
klasa wodoszczelności robota: p68
klasa wodoszczelności zasilacza: ip67
czujnik wynurzenia: tak
-
waga robota razem z bateriami (kg): 21
-

-
NEMH2O CLASIC
do basenu budowanego 13 898,00 zł
-
-
test: test
-
test: test
-
-
żyroskop, enkoder, inklinometr: tak
odbiornik bluetooth: tak
-
żyroskop, enkoder, inklinometr: tak
-
-
waga robota razem z bateriami (kg): 21
wymiary robota (mm): 410x460x320h
klasa wodoszczelności robota: p68
klasa wodoszczelności zasilacza: ip67
czujnik wynurzenia: tak
-
waga robota razem z bateriami (kg): 21
-
-
NEMH2O ELITE
do basenu budowanego 17 098,00 zł
-
-
maksymalna długość basenu (m): 50
prędkość poruszania się po dnie (m/min): 16-20
prędkość poruszania się po ścianach (m/min): 8
maksymalna głębokość (m): 10
filtr: 2 lt, 0,5 mm
ilość turbin: 2
typ silnika: bezszczotkowy
przeniesienie napędu: złącza magnetyczne
obudowa: "hermetyczna skorupa"
baterie litowo-jonowe (25.9v): 13,75 ah
zasilacz: 320 w
ładowanie indukcyjne: 8 a
tryb ładowania: automatyczny
średni czas ładowania: 1:45
średni czas pracy +/- 20%: 2:00
-
maksymalna długość basenu (m): 50
-
-
żyroskop, enkoder, inklinometr: tak
odbiornik bluetooth: tak
-
żyroskop, enkoder, inklinometr: tak
-
-
waga robota razem z bateriami (kg): 21
wymiary robota (mm): 410x460x320h
klasa wodoszczelności robota: p68
klasa wodoszczelności zasilacza: IP67
czujnik wynurzenia: tak
-
waga robota razem z bateriami (kg): 21
-
-
NEMH2O ELITE
do basenu istniejącego 17 098,00 zł
-
-
maksymalna długość basenu (m): 50
prędkość poruszania się po dnie (m/min): 16-20
prędkość poruszania się po ścianach (m/min): 8
maksymalna głębokość (m): 10
filtr: 2 lt, 0,5 mm
ilość turbin: 2
typ silnika: bezszczotkowy
przeniesienie napędu: złącza magnetyczne
obudowa: "hermetyczna skorupa"
baterie litowo-jonowe (25.9v): 13,75 ah
zasilacz: 320 w
ładowanie indukcyjne: 8 a
tryb ładowania: automatyczny
średni czas ładowania: 1:45
średni czas pracy +/- 20%: 2:00
-
maksymalna długość basenu (m): 50
-
-
żyroskop, enkoder, inklinometr: tak
odbiornik bluetooth: tak
-
żyroskop, enkoder, inklinometr: tak
-
-
waga robota razem z bateriami (kg): 21
wymiary robota (mm): 410x460x320h
klasa wodoszczelności robota: p68
klasa wodoszczelności zasilacza: IP67
czujnik wynurzenia: tak
-
waga robota razem z bateriami (kg): 21
-
-
NEMH2O DELUXE
do basenu budowanego 15 698,00 zł
-
-
maksymalna długość basenu (m): 25
prędkość poruszania się po dnie (m/min): 12-16
prędkość poruszania się po ścianach (m/min): 8
maksymalna głębokość (m): 10
filtr: 2 lt, 0,5 mm
ilość turbin: 2
typ silnika: bezszczotkowy
przeniesienie napędu: złącza magnetyczne
obudowa: "hermetyczna skorupa"
baterie litowo-jonowe (25.9v): 13,75 ah
zasilacz: 241 w
ładowanie indukcyjne: 6 a
tryb ładowania: automatyczny
średni czas ładowania: 2:30
średni czas pracy +/- 20%: 2:00
-
maksymalna długość basenu (m): 25
-
-
żyroskop, enkoder, inklinometr: tak
odbiornik bluetooth: tak
-
żyroskop, enkoder, inklinometr: tak
-
-
waga robota razem z bateriami (kg): 21
wymiary robota (mm): 410x460x320h
klasa wodoszczelności robota: p68
klasa wodoszczelności zasilacza: IP67
czujnik wynurzenia: tak
-
waga robota razem z bateriami (kg): 21
-

-
NEMH2O DELUXE
do basenu istniejącego 15 498,00 zł
-
-
maksymalna długość basenu (m): 25
prędkość poruszania się po dnie (m/min): 12-16
prędkość poruszania się po ścianach (m/min): 8
maksymalna głębokość (m): 10
filtr: 2 lt, 0,5 mm
ilość turbin: 2
typ silnika: bezszczotkowy
przeniesienie napędu: złącza magnetyczne
obudowa: "hermetyczna skorupa"
baterie litowo-jonowe (25.9v): 13,75 ah
zasilacz: 241 w
ładowanie indukcyjne: 6 a
tryb ładowania: automatyczny
średni czas ładowania: 2:30
średni czas pracy +/- 20%: 2:00
-
maksymalna długość basenu (m): 25
-
-
żyroskop, enkoder, inklinometr: tak
odbiornik bluetooth: tak
-
żyroskop, enkoder, inklinometr: tak
-
-
waga robota razem z bateriami (kg): 21
wymiary robota (mm): 410x460x320h
klasa wodoszczelności robota: p68
klasa wodoszczelności zasilacza: IP67
czujnik wynurzenia: tak
-
waga robota razem z bateriami (kg): 21
-
 NEMH2O CLASIC
NEMH2O CLASIC
do basenu istniejącego 13 998,00 zł -
 NEMH2O CLASIC
NEMH2O CLASIC
do basenu budowanego 13 898,00 zł -
 NEMH2O ELITE
NEMH2O ELITE
do basenu budowanego 17 098,00 zł -
 NEMH2O ELITE
NEMH2O ELITE
do basenu istniejącego 17 098,00 zł -
 NEMH2O DELUXE
NEMH2O DELUXE
do basenu budowanego 15 698,00 zł -
 NEMH2O DELUXE
NEMH2O DELUXE
do basenu istniejącego 15 498,00 zł








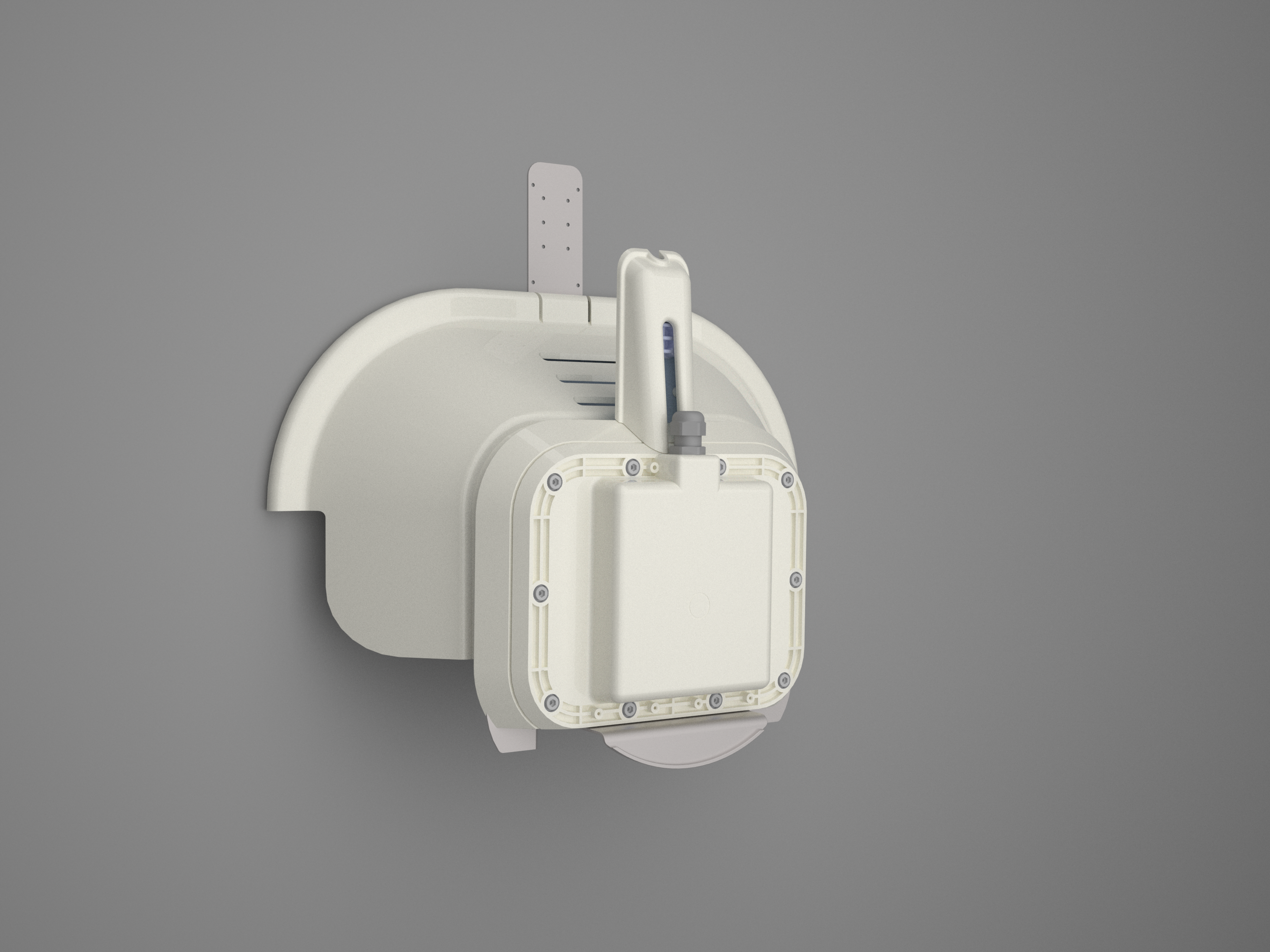
W zależności od tego czy nasz basen jest już użytkowany,
czy dopiero w budowie wybieramy do niego odpowiednią stację:
-
wiszącą, jeśli już korzystamy z basenu
-
wbudowaną, jeśli basen jest dopiero budowany
wtedy stacja może być ukryta w ścianie.
Robota można odpowiednio skonfigurować,
dostosowując go do rodzaju basenu i naszych potrzeb poprzez dodanie zestawów:
-
KIT KANEBO
polecany przy śliskich nawierzchniach dna i ścian basenu. Dzięki niemu NemH2O radzi sobie z poruszaniem po ścianach pionowych.
-
ZESTAW DO ZAOKRĄGLONEGO
DNApolecany w przypadku, kiedy ściana nie łączy się z dnem basenu pod kątem prostym i dno jest zaokrąglone.
-
COMMUNICATION BOX
polecany jeśli chcemy zatrzymać pracę robota i wysłać go do stacji gdy znajduje się pod wodą.